
Artificial Intelligence and Human Interaction
Combining supervised and reinforcement learning with human interaction modalities such as task demonstrations, eye gaze data, and natural language, to safely train autonomous systems.
Human-in-the-loop Machine Learning
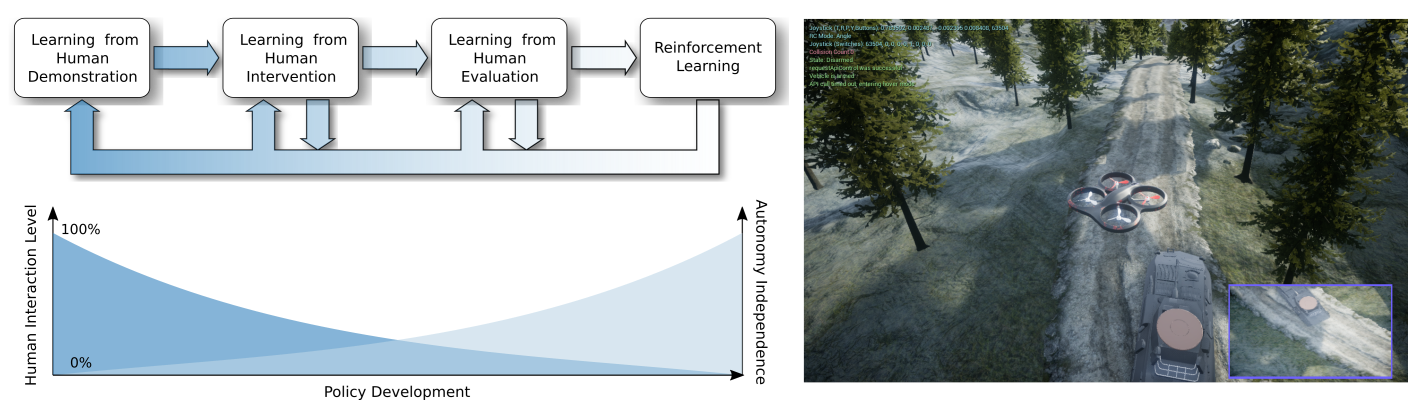
Cycle-of-Learning for Autonomous Systems from Human Interaction: a concept for combining multiple forms of human interaction with reinforcement learning. As the policy develops, the autonomy independence increases and the human interaction level decreases.
This research enables an agent to learn a single task in real-time from human interaction in the forms of demonstrations of the tasks, interventions and/or evaluations when the agent is performing it.
Intervention-based learning guides the user to supervise and correct the agent in real-time whenever their policy fails, providing more informative samples and increasing sample-efficiency during the training period.
Reinforcement learning component allows the agent to improve itself while interacting with the environment and surpassing human performance on the demonstrated tasks.
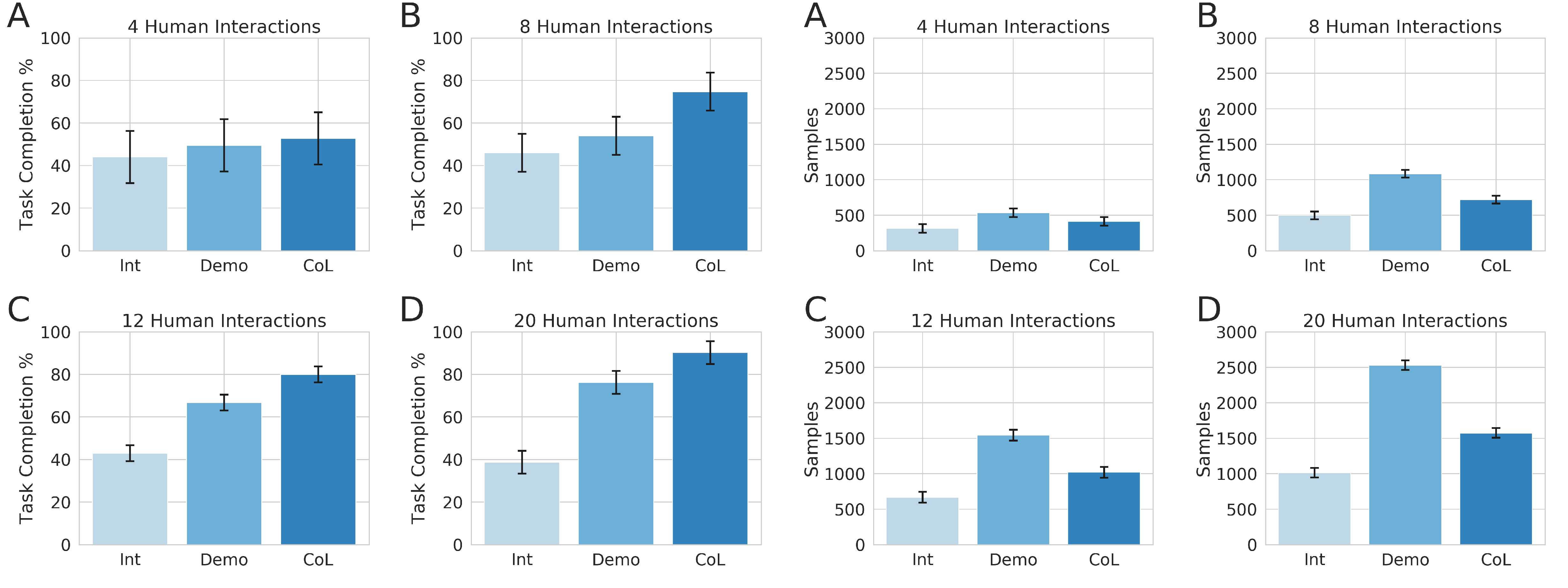
Performance comparison in terms of task completion and samples required with Interventions (Int), Demonstrations (Demo) and the Cycle-of-Learning (CoL) framework for (A) 4 human interactions, (B) 8 human interactions, (C) 12 human inter-actions and (D) 20 human interactions, respectively.
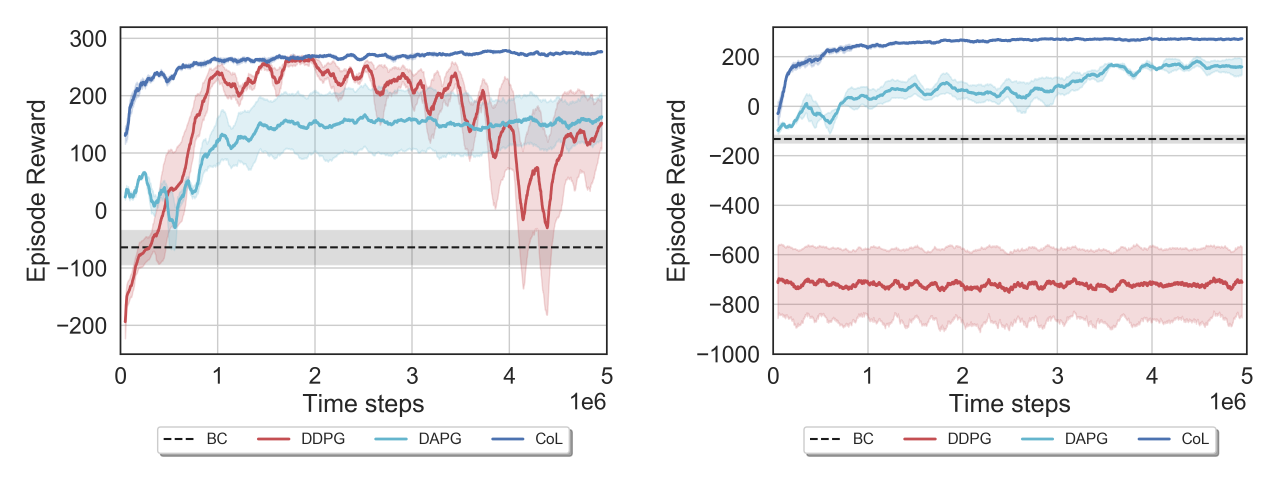
Comparison of CoL, BC, DDPG, and DAPG for 3 random seeds in the dense- and sparse-reward LunarLanderContinuous-v2 environment, respectively.
Integrating Behavior Cloning and Reinforcement Learning for Improved Performance in Sparse Reward Environments
- Project page
- Paper
- Video
- AAMAS20 Conference Presentation (video)
- Citation:
@inproceedings{goecks2020integrating, author = {Goecks, Vinicius G. and Gremillion, Gregory M. and Lawhern, Vernon J. and Valasek, John and Waytowich, Nicholas R.}, title = {Integrating Behavior Cloning and Reinforcement Learning for Improved Performance in Dense and Sparse Reward Environments}, year = {2020}, isbn = {9781450375184}, publisher = {International Foundation for Autonomous Agents and Multiagent Systems}, address = {Richland, SC}, booktitle = {Proceedings of the 19th International Conference on Autonomous Agents and MultiAgent Systems}, pages = {465–473}, numpages = {9}, keywords = {human-robot/agent interaction, machine learning for robotics, reinforcement learning, agent-based analysis of human interaction}, location = {Auckland, New Zealand}, series = {AAMAS ’20} }
Efficiently Combining Human Demonstrations and Interventions for Safe Training of Autonomous Systems in Real-Time
- Video
- Paper
- Citation:
@inproceedings{goecks2019efficiently, title={Efficiently combining human demonstrations and interventions for safe training of autonomous systems in real-time}, author={Goecks, Vinicius G and Gremillion, Gregory M and Lawhern, Vernon J and Valasek, John and Waytowich, Nicholas R}, booktitle={Proceedings of the AAAI Conference on Artificial Intelligence}, volume={33}, pages={2462--2470}, year={2019} }
Cycle-of-Learning for Autonomous Systems from Human Interaction
- Paper
- Citation:
@article{Waytowich2018, author = {Nicholas R. Waytowich and Vinicius G. Goecks and Vernon J. Lawhern}, title = {Cycle-of-Learning for Autonomous Systems from Human Interaction}, journal = {CoRR}, volume = {abs/1808.09572}, year = {2018}, url = {http://arxiv.org/abs/1808.09572}, archivePrefix = {arXiv}, eprint = {1808.09572}, biburl = {https://dblp.org/rec/bib/journals/corr/abs-1808-09572}, bibsource = {dblp computer science bibliography, https://dblp.org} }
Cyber-Human Approach For Learning Human Intention And Shape Robotic Behavior Based On Task Demonstration
PODNet: A Neural Network for Discovery of Plannable Options**
Intelligent Motion Video Guidance for Unmanned Air System Ground Target Tracking
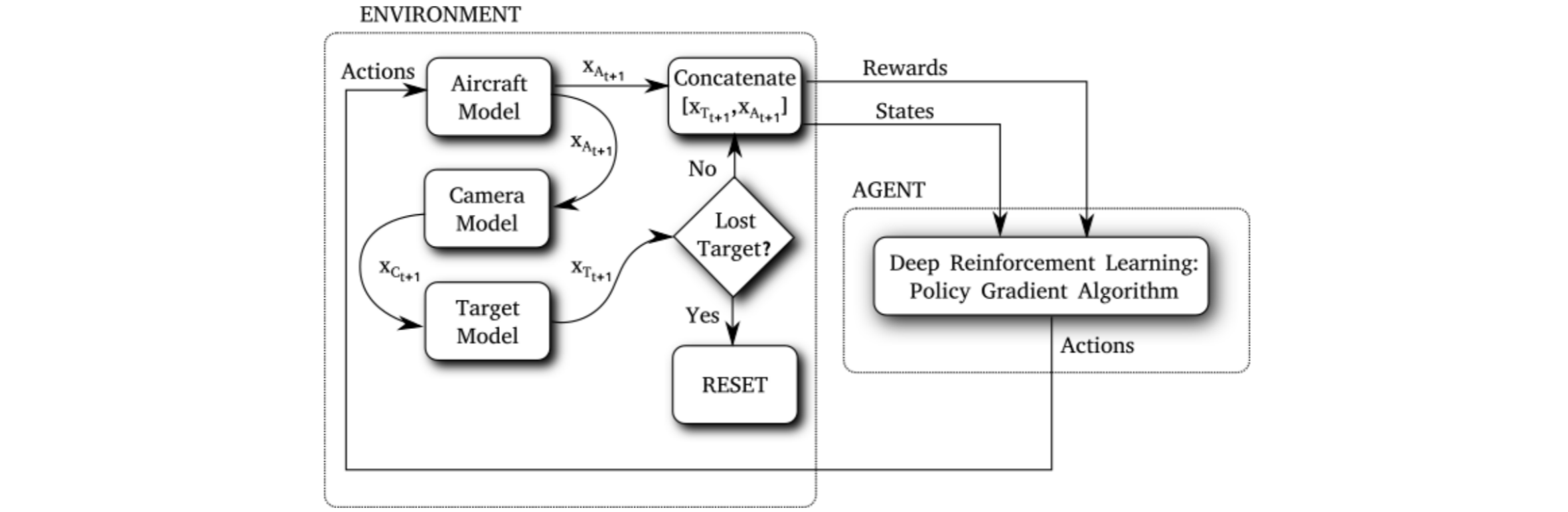
Reinforcement learning agent trained to control a real fixed-wing aircraft and perform video tracking of ground targets.
Morphing Wing
More information soon.