
Space Robotics and Power Electronics
Enabling Deep Space Exploration with an In-Space Propellant Depot Supplied from Lunar Ice
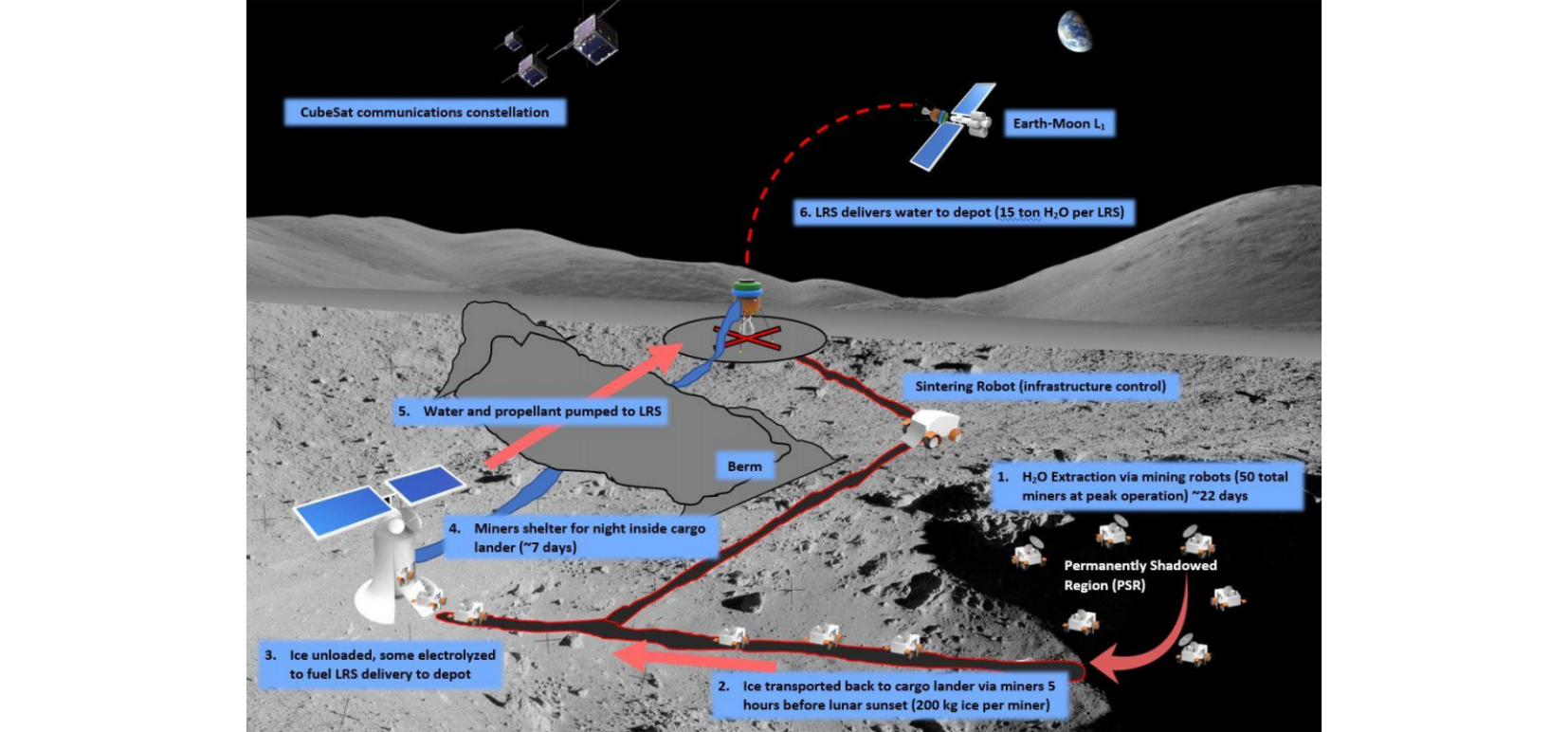
Caltech Space Challenge 2017 (Lunarport): design a space mission to produce propellant in space by extracting lunar resources and enable deep space missions.
Low-cost Satellite Attitude Control and Estimation Testbed (LAT)
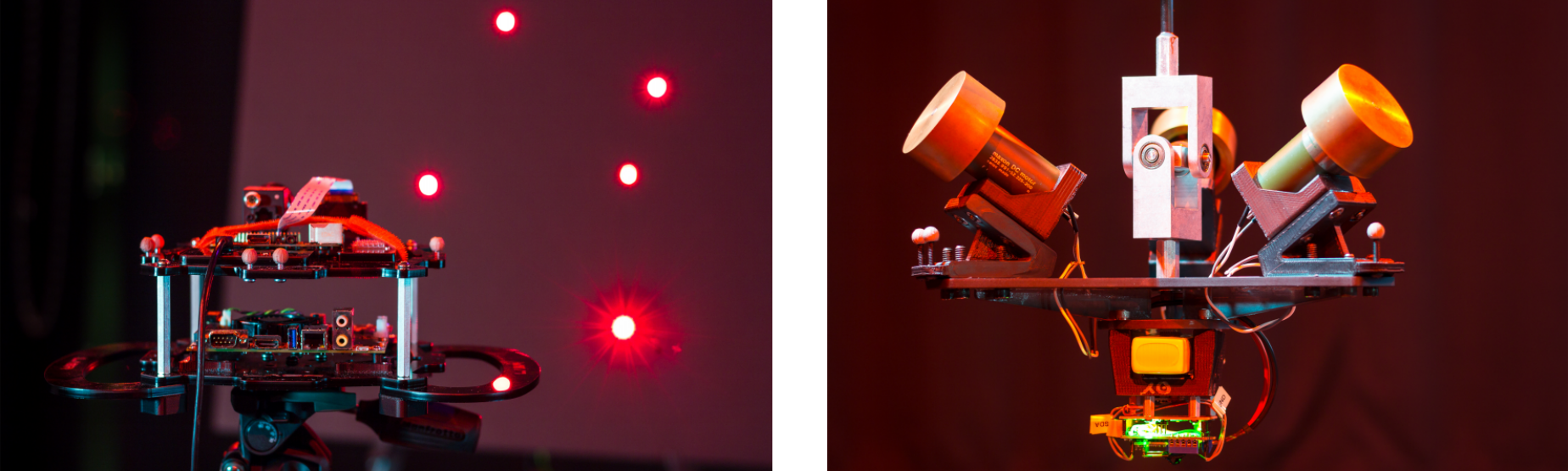
Custom 3-DoF experimental attitude platform for testing attitude control and estimation algorithms.
Computer Vision Aided Robotic Operations on the International Space Station
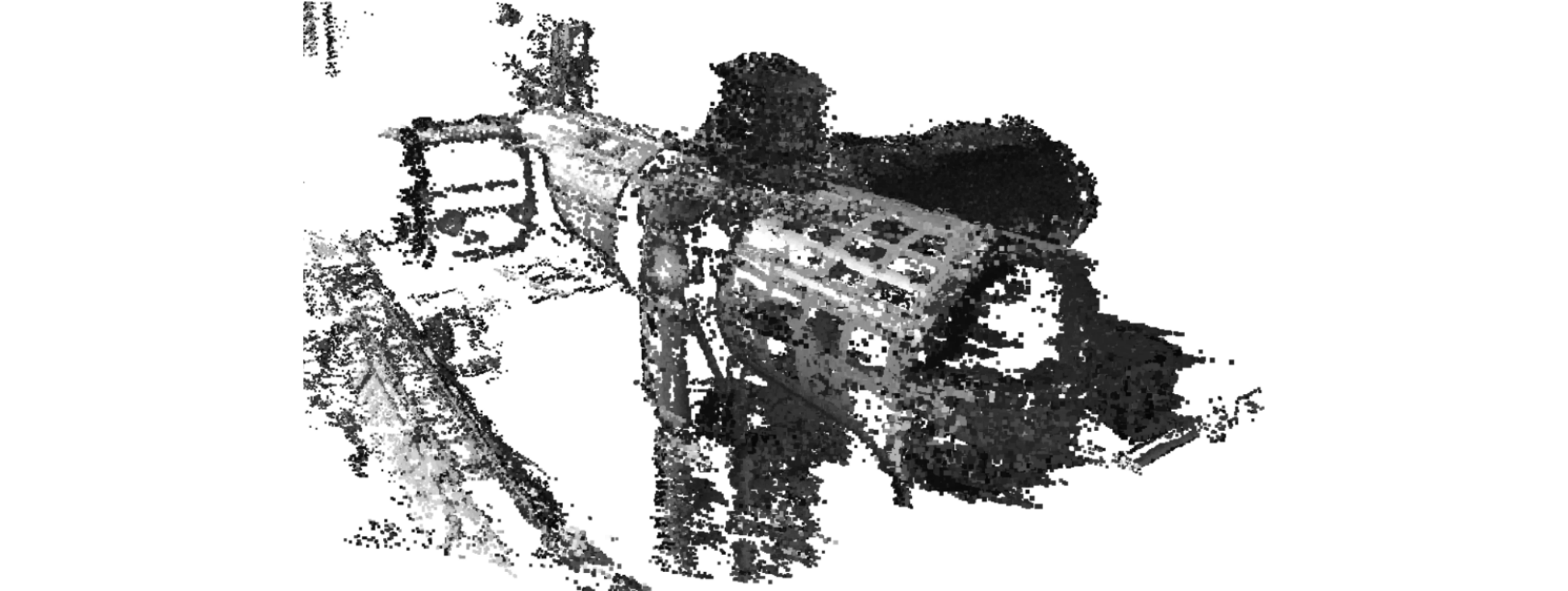
Development of a real-time, video-based, stereo reconstruction of large-scale environments to support robotics operations.
Space Robotics: Holonomic Omni directional Motion Emulation Robot (HOMER)
Assembling and testing a second HOMER unit for testing space proximity operation experiments.
The 2011 IEEE International Future Energy Challenge (IFEC’11)
Design and implementation of the Tri-State Boost Current Source Inverter (CSI), awarded the IES Best Innovative Design of Power Electronic Converters during the IFEC’11.